martes, 17 de noviembre de 2015
jueves, 12 de noviembre de 2015
lunes, 26 de octubre de 2015
miércoles, 14 de octubre de 2015
martes, 6 de octubre de 2015
HISTORIA DE LA COMPUTADORA
Historia de la computadora
1614

John Napier (1550-1617) publicó un texto sobre el descubrimiento del logaritimo. Napier también inventó el sistema de Rods (referido como Rods de Napier o los huesos de Napier). Esto hizo que fuera posible multiplicar, dividir, calcular la raíz cuadrada y cubica girando los rods, y colocándolos en placas especiales.
1623

Wilhelm Schickard (1592-1635), en Tuebingen, Wuerttemberg (ahora Alemania), Creó el "Reloj Calculador". Este instrumento era capaz de sumar y restar 6 digitos, y en el caso de que el resultado sea mayor que 6 digitos, tocaba una campana. Las operaciones eran hechas mediante una manivela, que giraba y los números cambiaban, como en el contador K7 de los nuestro días.
1642

Francés matemático, Blaise Pascal construyó la máquina que sumaba (la “Pascalina”). A pesar de ser inferior al "Reloj Calculador" del Schickard (ver 1623), la máquina de Pascal se hizo más famosa. El vendió docenas de ejemplares de la máquina en varias formas, logrando procesar hasta 8 dígitos.
1672

Después de muchas tentativas, finalmente es inventada en 1672 la primera máquina de calcular capaz de desarrollar las cuatro operaciones matemáticas (suma, resta, división y multiplicación) y además la raíz cuadrada. Esa gran conquista fue atribuida al matemático Gottfried Wilhelm Von Leibnitz que mejoró la máquina de Pascal y obtuvo la calculadora universal.
1801

El telar automático era un telar con entrada de datos por medio de tarjetas perforadas para controlar la confección de tejidos y sus respectivos dibujos. Fue creado en 1801 por Joseph Marie Jackuard y puede ser considerada la primera máquina mecánica programable de la historia.
1822

La Máquina Diferencial fue idealizada por el profesor y matemático de la Universidad de Cambridge, Charles Babbage, en 1822. Era un dispositivo mecánico basado en ruedas dentadas capaz de computar e imprimir extensas tablas científicas. A pesar de tantas ventajas, esta máquina nunca llegó a ser construida a causa de las limitaciones tecnológicas de la época.
1834
George Scheutx, de Estocolmo, produjo una pequeña máquina de madera, después de leer una pequeña descripción del proyecto de Babbage.
1848
El Inglés Matemático George Boole inventa el álgebra binaria booleana, abriendo el camino para eldesarrollo de computadoras casi 100 años después.
1878

Ramón Verea, viviendo en Nueva York, inventa una calculadora con una tabla de multiplicación interna; es decir más fácil que girar engranajes u otros métodos. El no estaba interesado en producirla, sólo quiso mostrar que los españoles podían inventar como los americanos.
1885
Una calculadora de multiplicación más compacta entra en producción masiva. La producción es más o menos simultánea con la invención de Frank S. Baldwin, de Estados Unidos, y T. Odhner, suizo viviendo en Rusia.
1890

El censo de los Estados Unidos.
En 1880 el censo llevó siete años para ser completado , ya que todos los cálculos fueron hechos a mano en papel de periódico. Por el aumento de la población se imaginó que el censo de 1890 llevaría más de 10 años, entonces fue realizado un concurso para hallar el mejor método para realizar el cómputo de los resultados. Este concurso fue ganado por un empleado del Censo,Herman Hollerith, quien fundaría la Tabulating Machine Company, que luego se transformó en IBM. Herman tomó prestada la idea de Babbage de usar tarjetas perforadas (vea 1801) para hacer el sistema de memoria. Con este método usado en 1890, el resultado (62,622,250 personas) estuvo listo en sólo 6 semanas. Con el sistema de memoria el análisis de los resultados fue muy fácil pero, a pesar de ser más eficiente, el costo del Censo de 1890 fue un 198% mas costoso que el de 1880.
1941
Resultado de la 2da Guerra Mundial, la computadora Z3, construido por los alemanes, tenía como principal función la codificación de mensajes. Sin embargo fue destruida en Berlín dejándonos muy poca información sobre esta computadora.
1943

Así como los alemanes, los ingleses también fueron en búsqueda de tecnologías para descifrar códigos secretos construyendo entonces el Colossus (Servicio de Inteligencia Británico). Poseyendo dimensiones gigantescas, el Colossus funcionaba por medio de válvulas llegando a procesar cerca de 5 mil caracteres por segundo. Fue inventado por Turing.
1944

Mark I (Howard Aiken) fue la primer computadora electromecánica construida. Bastante diferente de las computadoras actuales, Mark I medía 18 metros de largo, dos metros de ancho y pesaba 70 toneladas.Estaba constituida por 7 millones de piezas móviles y su cableado alcanzaba los 800 Km. Con la llegada de las computadoras electrónicas Mark I fue inmediatamente sustituida.
1945
John Von Neumann, ingeniero matemático húngaro y naturalizado americano desarrolló un proyecto de computadora basado en la lógica, con almacenamiento electrónico de la información y de datos de programación. La computadora procesaría los datos de acuerdo con las necesidades del usuario, o sea, las instrucciones no vendrían predeterminadas. Más tarde esa computadora fue construida recibiendo el nombre de Edvac.
El primer BUG de computadora fue relatado por la Oficial Naval y Matematica Grace Murray Hopper, el BUG era una polilla dentro de la computadora, la cual hizo que la computadora tuviera un desperfecto en sus cálculos.
1946

John W. Mauchly y J. Prester Eckert Jr., junto con científicos de la Universidad de la Pensilvania, construyeron la primera computadora electrónica,conocido como ENIAC (Electronic Numerical Integrator and Calculator), tenía aproximadamente 18 mil válvulas, pesaba 30 toneladas y llegaba a consumir 150 KW. En contrapartida superaba mil veces la velocidad de las otras computadoras, llegando a realizar 5 mil operaciones por segundo.
1947
Presper Eckert y John Mauchly, pioneros en la historia de la computadora, fundaron la Cía. Eckert-Mauchly Computer Corporation, con el objetivo de fabricar máquinas basadas en sus experiencias como el ENIAC y el EDVAC.
1948

La primera computadora comercial es inventada, llamada UNIVAC. John Bardeen, Walter Brattain y William Shockley de Bell Labs patentarían el primer transistor.
1949
Thomas Watson Jr. en una charla en un encuentro de ventas de IBM preanunció que todas las partes móviles en las computadoras serían sustituidas por componentes electrónicos en una década.
1951
El Univac fue la primera computadora comercializada. Proyectada por J. Presper Ecker y John Mauchly, ejecutaba 1905 operaciones por segundo y su precio llegó a US$ 1.000.000.
1952
Heinz Nixdorf fundó la Cía. Nixdorf Computer Corporation, en Alemania. Esta permaneció como una corporación independiente hasta su unión con Siemens, en 1990.
1953

La Internation Business Machines IBM lanza su primera computadora digital, la IBM 701. Como primera computadora de la marca comercializada, fueron vendidas 19 máquinas en tres años.
1954

El genio de la matemática Alan Turing publicó el libro "On Computable Numbers" proponiendo cuestiones significativas sobre programación e inteligencia humana. Utilizó sus aplicaciones de lógica en el desarrollo del concepto de máquina Universal. Texas Instruments anunció el inicio de la producción de los transistores.
1955

Anunciado por los laboratorios AT&T Bell, la Tradic fue la primera computadora transistorizada, teniendo aproximadamente 800 transistores en el lugar de los antiguos tubos de vacío, lo que le permitía trabajar con menos de 100 Watts de consumo de energía.
LA NANOTECNOLOGÍA
Nanotecnología

La nanotecnología es la manipulación de la materia a escala nanométrica. La más temprana y difundida descripción de la nanotecnología1 2 se refiere a la meta tecnológica particular de manipular en forma precisa los átomos y moléculas para la fabricación de productos a macroescala, ahora también referida como nanotecnología molecular. Subsecuentemente una descripción más generalizada de la nanotecnología fue establecida por la Iniciativa Nanotecnológica Nacional, la que define la nanotecnología como la manipulación de la materia con al menos una dimensión del tamaño de entre 1 a 100 nanómetros. Esta definición refleja el hecho de que los efectos mecánica cuántica son importantes a esta escala del dominio cuántico y, así, la definición cambió desde una meta tecnológica particular a una categoría de investigación incluyendo todos los tipos de investigación y tecnologías que tienen que ver con las propiedades especiales de la materia que ocurren bajo cierto umbral de tamaño. Es común el uso de la forma plural de "nanotecnologías" así como "tecnologías de nanoescala" para referirse al amplio rango de investigaciones y aplicaciones cuyo tema en común es su tamaño. Debido a la variedad de potenciales aplicaciones (incluyendo aplicaciones industriales y militares), los gobiernos han invertido miles de millones de dólares en investigación de la nanotecnología. A través de su Iniciativa Nanotecnológica Nacional, Estados Unidos ha invertido 3,7 mil millones de dólares. La Unión Europea ha invertido[cita requerida] 1,2 mil millones y Japón750 millones de dólares.3
sábado, 3 de octubre de 2015
sábado, 26 de septiembre de 2015
LA ROBÓTICA EN LA CIENCIA FICCIÓN
La robótica en la ciencia ficción
Durante siglos nos ha fascinado la idea de crear seres mecanizados que casi podrían confundirse con uno de nosotros. Y a medida que nuestro conocimiento tecnológico avanza, nos acercamos cada vez más a lograrlo.
Desde los robots que puedes comprar ahora hasta los que invaden la fuerza laboral y la militar, nuestros amigos automatizados ya no son solo parte de las películas de ciencia ficción.
Pero como muchos avances científicos, la fantasía fue uno de los principales motivadores.
“La investigación científica y la ciencia ficción comienzan con las mismas palabras: ‘¿Qué pasaría si...?’”, dice el profesor de Física James Kakalios, titular del curso Todo lo que sabemos sobre la ciencia lo aprendimos de un comic, de la Universidad de Minnesota, en Estados Unidos.
Así que vale la pena echar un vistazo a los robots más influyentes de la cultura pop que ayudaron a inspirarnos en el camino.
El robot de Leonardo
El famoso pintor, escultor, inventor, ingeniero y genio versátil, Leonardo da Vinci, bosquejó su idea de un “caballero mecánico”. El resultado fue una especie de armadura automatizada por un sistema de poleas y palancas, que se cree fue exhibido en una fiesta en la corte de Milán, Italia, en 1495.
Podía ponerse de pie, sentarse, mover el brazo y levantar su visor.
Cuando las notas del trabajo de Da Vinci fueron descubiertas en la década de 1950, los investigadores recrearon el “robot”, lo que sugiere que su idea en realidad habría funcionado.
El autómata probablemente era impulsado por humanos, lo que significa que técnicamente no es un robot. Pero Leonardo trabajó posterioremente en construcciones programables, como un león automatizado, lo que sugiere que definitivamente tramaba algo.
Los primeros ‘robots’
R.U.R. (siglas en inglés de “Robots Universales de Rossum”) es una obra de teatro checa que se estrenó en 1921.
Se cree que fue la primera vez que el término “robots” se utilizó para describir a personas artificiales, las cuales, en el relato, son fabricadas con material sintético.
En checo, robota significa trabajo forzado.
Como ocurre en estos casos, los entres parecidos a cyborgs de la obra parecen estar perfectamente felices de servir a los humanos, hasta que una revuelta termina en la extinción de la raza humana. (No siempre se gana.)
La obra fue un gran éxito y, para 1923, estaba traducida en 30 idiomas.
María, la Maschinenmensch
El primer robot de película no se quedó atrás.
En 1927, Metropolis, de Fritz Lang, retrataba una imagen de un futuro distópico que sería retratado de nuevo décadas después en películas como Blade Runner.
En este, los industriales ricos crean a un robot mujer para hacerse pasar por María, una mujer que temen que organice a los trabajadores a quienes oprimen.
Varias celebridades, desde Queen hasta Nine Inch Nails y Madonna, tienen videos musicales inspirados en Metropolis o con clips de esta película. Medio siglo después de Metropolis, el androide C-3PO, de Star Wars, estuvo altamente inspirado en el robot María.
Las tres leyes de Asimov
El relato corto del que vienen, Runaround, fue escrito en 1942, pero se dio a conocer para las masas cuando la historia apareció en la colección de 1950 del escritor de ciencia ficción, Isaac Asimov: Yo, robot.
Antes de Asimov, la mayoría de las historias de robots seguían un patrón similar: primero los científicos crean a los robots y luego los robots se vuelven locos y atacan a sus creadores.
Aburrido de esta narrativa, Asimov estableció nuevas reglas en el camino de la robótica. Sus famosas 'Tres Leyes' son:
• Un robot no puede lastimar a un ser humano, o a través de la inacción, permitir que un ser humano resulte lastimado.
• Un robot debe obedecer las órdenes que le dan los seres humanos, excepto cuando esas órdenes entren en conflicto con la Primera Ley.
• Un robot debe proteger su propia existencia, siempre y cuando esa protección no entre en conflicto con la Primera o la Segunda Ley.
Pero eso no erradicó del todo los problemas. Muchas de las historias de Asimov, y las historias y películas que sus leyes inspiraron, se enfocaron los conflictos que surgen cuando los robots tienen problemas en decidir cómo obedecer las leyes en situaciones complejas del mundo real.
Estas leyes también se llevan el crédito por ayudar a crear el robot “adorable” en la ciencia ficción: un arquetipo popularizado en la televisión y las películas desde Perdidos en el espacio hasta Star Wars yCortocircuito.
HAL 9000
HAL 9000 fue, indiscutiblemente, la estrella de 2001: Odisea en el espacio, la épica e innovadora película de Stanley Kubrick de 1968.
Esta voz impasible e incorpórea, capaz de controlar mecánicamente la nave Discovery, representaba nuestros temores de lo que pasaría si la tecnología se saliera de control, en los albores de la Era Espacial. Un año después, el hombre caminó por primera vez en la Luna.
En lugar de obedecer las Leyes de Asimov, la misión de HAL, antes que nada, es asegurarse de que la misión de su nave sea un éxito. Y dicha orden tiene un resultado mortal y casi desastroso.
Algunos afirman que, debido a que no tenía una forma física, HAL realmente no es un robot. Pero la Universidad Carnegie Mellon decidió que merecía entrar al Salón de la Fama de los Robots con su clase inaugural, en 2003.
R2-D2 y C-3PO
Probablemente nadie impulsó más a los robots en la conciencia pública que estos dos, cuando llegaron a la pantalla en 1977.
Llenos de personalidad, galantes y siempre útiles, la pareja ha aparecido en las seis películas de Star Wars hasta la fecha.
El director, George Lucas, dijo que R2-D2 es su personaje favorito de las películas.
Terminator
Skynet es el sistema que dirige a los Terminator; los robots de la serie de películas (y posteriormente programas de televisión) que comenzó en 1984.
Los robots de Terminator son una nueva encarnación de nuestros peores miedos; máquinas asesinas que viajan en el tiempo. Y todo se debe a que las personas a cargo anteponen el "qué podemos hacer" al "qué debemos hacer".
Data
Data es como un "antiterminator”.
El androide de Star Trek: la nueva generación es una creación científica tan perfectamente cercana a un humano, que su mente hipermotorizada no puede evitar querer ser uno de nosotros.
Al final, un “chip de emoción” concedió el deseo de Data, como a una especie de Pinocho, de convertirse en alguien “de verdad”.
Robotina
Quién no quiere ahorrarse los quehaceres de la casa con un robot, aunque tenga un fuerte temperamento. Robotina, la ayudante de limpieza de Los supersónicos, se dedicaba a mantener limpia la casa y atender a la familia. Algo no muy distinto de lo que esperan algunos ingenieros de sus robots.
Wall-E
Wall-E salió en 2008.
Podría decirse que la película ganadora de un Premio de la Academia es la mejor de Pixar, y una gran razón para eso fue la “actuación” sin palabras pero conmovedora de Wall-E.
Como en la mayoría de los relatos de ciencia ficción, Wall-E aborda cuestiones sociales más grandes, como el consumismo desenfrenado y los desperdicios ambientales, todo ello con la inocente presencia de un robot que se conecta con millones de espectadores, jóvenes y viejos, a un nivel personal.

EL MERCADO DE LA ROBÓTICA Y LAS PERSPECTIVAS FUTURAS
El Mercado De La Robótica Y Las Perspectivas Futuras
Las ventas anuales para robots industriales han ido creciendo en un 25%. El incremento de èsta tasa se debe a factores muy diversos. En primer lugar, hay más personas en la industria que tienen conocimiento de la tecnología y de su potencial para sus aplicaciones de utilidad. En segundo lugar, la tecnología de la robótica mejorará en los próximos años de manera que hará a los robots más amistosos con el usuario, más fáciles de interconectar con otro hardware y más sencillo de instalar. En tercer lugar, crece el mercado. En cuarto lugar, se espera que el mercado de la robótica sufra una expanción más allá de las grandes empresas. La robótica es una tecnología con futuro y también para el futuro. Si continúan las tendencias actuales, los robots del futuro serán unidades móviles con uno o más brazos, capacidades de sensores múltiples y con la misma potencia de procesamiento de datos y de cálculo que las grandes computadoras actuales.

LA ROBÓTICA CUÁNTICA
LA ROBÓTICA CUÁNTICA
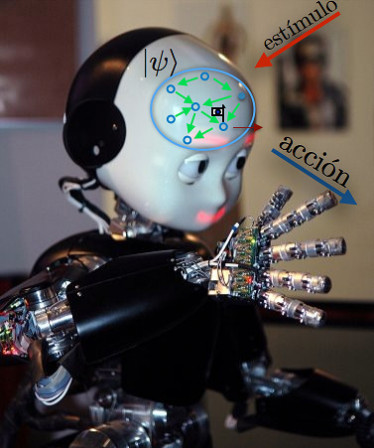
El mundo de las comunicaciones y los ordenadores se está revolucionado gracias a la introducción de la mecánica cuántica, pero esta misma herramienta también podría emplearse para desarrollarrobots, autómatas y demás agentes que usen la Inteligencia Artificial (IA), según un estudio realizado por investigadores de la Universidad Complutense de Madrid (UCM) y la Universidad de Innsbruck (Austria) que ha sido publicado en la revista Physical Review X.
La mecánica cuántica, concretamente, podría favorecer el aprendizaje (machine learning, en inglés) de esta clase de agentes pudiendo así esponder de forma óptima y más rápida al entorno, elaborando modelos y predicciones muy precisas. Los mismos motores que se aplican, por ejemplo, para conocer la evolución del clima o en el desarrollo de los motores de búsqueda por internet.
martes, 15 de septiembre de 2015
LOS PRIMEROS ROBOTS
ROBOTS


Un robot es una entidad virtual o mecánica artificial. En la práctica, esto es por lo general un sistema electromecánico que, por su apariencia o sus movimientos, ofrece la sensación de tener un propósito propio. La independencia creada en sus movimientos hace que sus acciones sean la razón de un estudio razonable y profundo en el área de la ciencia y tecnología. La palabra robot puede referirse tanto a mecanismos físicos como a sistemas virtuales de software, aunque suele aludirse a los segundos con el término de bots.1
No hay un consenso sobre qué máquinas pueden ser consideradas robots, pero sí existe un acuerdo general entre los expertos y el público sobre que los robots tienden a hacer parte o todo lo que sigue: moverse, hacer funcionar un brazo mecánico, sentir y manipular su entorno y mostrar un comportamiento inteligente, especialmente si ese comportamiento imita al de los humanos o a otros animales. Actualmente podría considerarse que un robot es una computadora con la capacidad y el propósito de movimiento que en general es capaz de desarrollar múltiples tareas de manera flexible según su programación; así que podría diferenciarse de algún electrodoméstico específico.
Aunque las historias sobre ayudantes y acompañantes artificiales, así como los intentos de crearlos, tienen una larga historia, las máquinas totalmente autónomas no aparecieron hasta el siglo XX. El primer robot programable y dirigido de forma digital, el Unimate, fue instalado en 1961 para levantar piezas calientes de metal de una máquina de tinte y colocarlas.
Por lo general, la gente reacciona de forma positiva ante los robots con los que se encuentra. Los robots domésticos para la limpieza y mantenimiento del hogar son cada vez más comunes en los hogares. No obstante, existe una cierta ansiedad sobre el impacto económico de la automatización y la amenaza del armamento robótico, una ansiedad que se ve reflejada en el retrato a menudo perverso y malvado de robots presentes en obras de la cultura popular. Comparados con sus colegas de ficción, los robots reales siguen siendo limitados.
LA HISTORIA DE LA ROBÒTICA
Robótica

{kind=link}
{kind=link}
{kind=link}
La robótica es la rama de la tecnología que se dedica al diseño, construcción, operación, disposición estructural, manufactura y aplicación de los robots.1 2
La robótica combina diversas disciplinas como son: la mecánica, la electrónica, la informática, la inteligencia artificial, laingeniería de control y la física.3 Otras áreas importantes en robótica son el álgebra, los autómatas programables, laanimatrónica y las máquinas de estados.
El término robot se popularizó con el éxito de la obra R.U.R. (Robots Universales Rossum), escrita por Karel Čapek en 1920. En la traducción al inglés de dicha obra, la palabra checa robota, que significa trabajos forzados, fue traducida alinglés como robot.4
Historia de la robótica
La historia de la robótica va unida a la construcción de "artefactos", que trataban de materializar el deseo humano de crear seres a su semejanza y que lo descargasen del trabajo. El ingeniero español Leonardo Torres Quevedo (GAP) (que construyó el primer mando a distancia para su automóvil mediante telegrafíasin hilo,[cita requerida] el ajedrecista automático, el primer transbordador aéreo y otros muchos ingenios) acuñó el término "automática" en relación con la teoría de la automatización de tareas tradicionalmente asociadas.
Karel Čapek, un escritor checo, acuñó en 1921 el término "Robot" en su obra dramática Rossum's Universal Robots / R.U.R., a partir de la palabra checa robota, que significa servidumbre o trabajo forzado. El término robótica es acuñado por Isaac Asimov, definiendo a la ciencia que estudia a los robots. Asimov creó también las Tres Leyes de la Robótica. En la ciencia ficción el hombre ha imaginado a los robots visitando nuevos mundos, haciéndose con el poder, o simplemente aliviando de las labores caseras.
Suscribirse a:
Entradas (Atom)